
5.0 • Frequency Analysis 


T he root locus approach discussed in previous chapters is a technique for analyzing differential equation and designing control systems in the time domain. An alternate approach is to do the design in the frequency domain. In the time domain we used Laplace transforms. In the frequency domain we will use Fourier transforms. Fortunately, Laplace and Fourier and transforms are closely related (remind me).
For transfer functions used on this site, you can make the simple solution, s = jω, to convert between Laplace and Fourier transforms.
Frequency domain analysis is useful because it provides a different perspective on control systems design - and sometimes a different perspective makes the design process easier or gives some insight. In some cases its also possible to generate the frequency domain model experimentally, eliminating the need to develop an analytical model.
A Bode plot is a plot of the frequency response of the system at steady state. The frequency response of a system can be found by exciting the input with a sinusoidal frequency with an amplitude of one. Differential equations theory tells us that the output of the system will also will be sinusoidal with the same frequency as the input sinusoid but may have a different magnitude and phase.
Figure 5.1 show the input and output for a simple transfer function. Vary the input frequency and observe how the output changes in both the amplitude and the phase.
The Bode plot is a graph showing the magnitude and phase of the output as a function of frequency. Frequency is measured on a log scale. Magnitude is measured in decibels (remind me) The figure below shows the Bode plot (frequency plot) for the system in Fig 5.1. The green line indicate the current frequency selected in that figure.
Given a transfer function you can compute the magnitude and phase shift at a given frequency by making the substitution, s = j ω. The magnitude is the magnitude of the resulting complex value, and the phase is the phase angle of that value.
For example, compute the frequency response for (math help)
To create a Bode plot, calculate the gain and phase for 0 < ω < ∞ and plot the values. This of course, is not very practical with out the use of a computer. However, you can quickly sketch a Bode plot using linear approximations.
The brute force method described above always works, but is not practical without a computer. In most cases an approximation is adequate and can be drawn using a few simple rules.
To create an approximation of the Bode plot, start by separating the transfer function into the product of real poles and zeros, and complex poles and zeros. Then sketch the approximation for each pole and zero then graphically add all of the plots together. This works because Bode plots are drawn on a log scale. To multiply factor you add them in log space. (trivia) The following figures show the approximations for different pole and zeros combinations (Single sheet view) Notice that for each case we have divided out the gain so that the DC gain is unity (explain)
G(s)= K A constant has the same gain at all frequencies. On the bode plot this is a straight line at 20log(K). The phase shift is zero for all frequencies. G(s) = 1____________s G(s) = s G(s) = 1____________s/a+1 G(s) = s/a+1____________1 G(s) = 1____________s2/ωn2 + 2ζ/ωn + 1 G(s) = s2/ωn2 + 2ζ/ωn + 1____________1 | 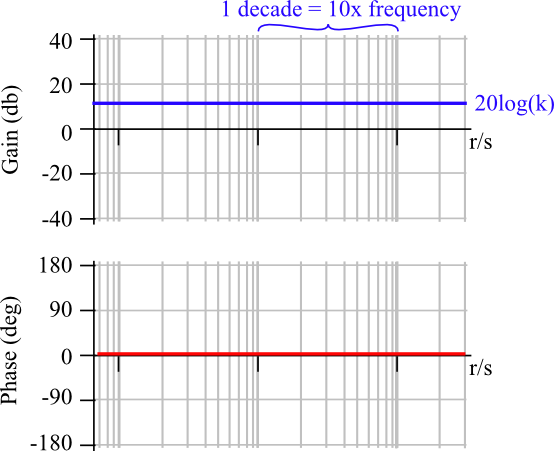 |




 0:00
0:00 Bode Plots
Bode Plots