
4.0 • Root Locus 


I n control systems it is common to design a controller with proportional gain feedback where the closed-loop system has the form
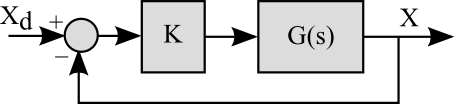
The design problem is to choose a value for k so that the closed-loop system satisfies some design specifications (see Section 2.3). The closed loop transfer function for Fig 4.1 is
This is the motivation for the Root Locus method. The root locus is a graph of all possible roots of a polynomial as some parameter is varied from 0 to ∞. It shows the designer every possible solution to the design problem. The designer then only need to pick a set of possible roots and find the corresponding k .
In this discussion we used a simple proportional feedback problem. However, the root locus method can be applied to most linear control system problems where the designer needs to pick a value for a single parameter.
Given a polynomial of the form
The polynomial, Eqn 4.1.5, has p roots. We can plot a root locus (the locus of all possible roots) for 0<k<∞ by varying k, calculating the roots of the resulting polynomial for each value of k and plotting the roots on the complex plane. This is the brute force method for creating a root locus.
Fig 4.2 shows the roots of a polynomial as k is varied. Adjust the values of k to see how the roots of the equation vary with k.
In many design cases we don’t need an exact root locus. We instead need a approximate root locus so we can determine if the proposed controller configuration is capable of achieving the performance specification. There are several rules that help us approximate a root locus. On this site we present a simple set of rules. See a controls text for a complete set.
Root locus can be used to analyze the characteristic equation of any system. However, when the system uses proportional gain with unity feedback the technique has a simple interpretation (this was discussed at the beginning of this chapter, but its repeated here for clarity).
Given a closed loop system with proportional feedback
This has the same form as Eqn 4.1.5. Notice that the poles of G(s) are the roots of d(s) = 0 and the zeros of G(s) are the roots of n(s) = 0. In control systems design we say that theThe root locus of G(s) starts at the poles of G(s) and ends at the zeros of G(s).
Remember this is a special case where the system has the form of Fig 4.1. If the system does not have this form, find the closed-loop characteristic equation and use algebra to put it in a form d(s)+ k n(s) = 0 where d(s) and n(s) are some polynomial, not necessarily the numerator and denominator of G(s).
 Root Locus
Root Locus
Sketch the approximate root locus for the following polynomial. Then use the root locus tool to verify your results.
The root locus has three branches, which start at 0, +4i, -4i. The branches end at the zeros +2i, -2i and -∞ on the real axis.
Links to relevant homework: